
🎯 3D Vision
My research in 3D vision focuses on combining neuromorphic sensors with modern 3D reconstruction techniques, particularly Gaussian Splatting, to enable high-quality 3D scene capture under challenging conditions.
First-Author Papers

### USP-Gaussian: Unifying Spike-based Image Reconstruction, Pose Correction and Gaussian Splatting
**CVPR 2025 - Highlight**
We present a unified framework that jointly optimizes spike-to-image reconstruction, camera pose estimation, and 3D Gaussian Splatting. This enables 3D reconstruction from spike cameras under extreme motion and low-light conditions.
**Key Contributions:**
- First 3D Gaussian Splatting from spike camera inputs
- Mutual enhancement between 2D reconstruction and 3D optimization
- Differentiable pose correction module
\[[Paper](https://arxiv.org/abs/2411.10504)\] \[[Code](https://github.com/chenkang455/USP-Gaussian)\]
Collaborative Works
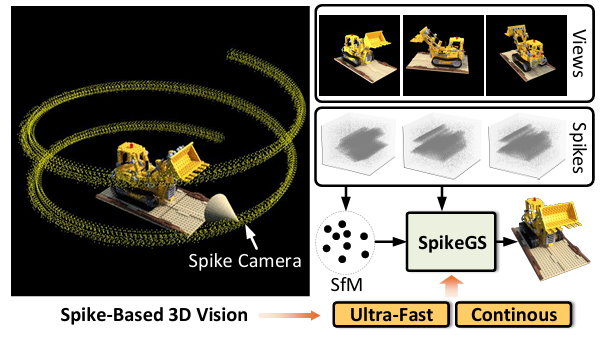
### SpikeGS: 3D Gaussian Splatting from Spike Streams with High-Speed Camera Motion
**ACM MM 2024**
SpikeGS explores 3D Gaussian Splatting specifically designed for spike camera inputs, focusing on scenarios with high-speed camera motion where traditional methods fail.
**Key Contributions:**
- Spike-specific rendering loss functions
- Motion-aware Gaussian densification
- Robust reconstruction under rapid movements
\[[Paper](https://arxiv.org/abs/2407.10062)\]
Research Vision
The combination of neuromorphic sensors and 3D vision opens exciting possibilities:
- Autonomous Driving: High-speed 3D perception for fast-moving vehicles
- Robotics: Real-time 3D mapping in dynamic environments
- AR/VR: Low-latency 3D scene capture for immersive experiences